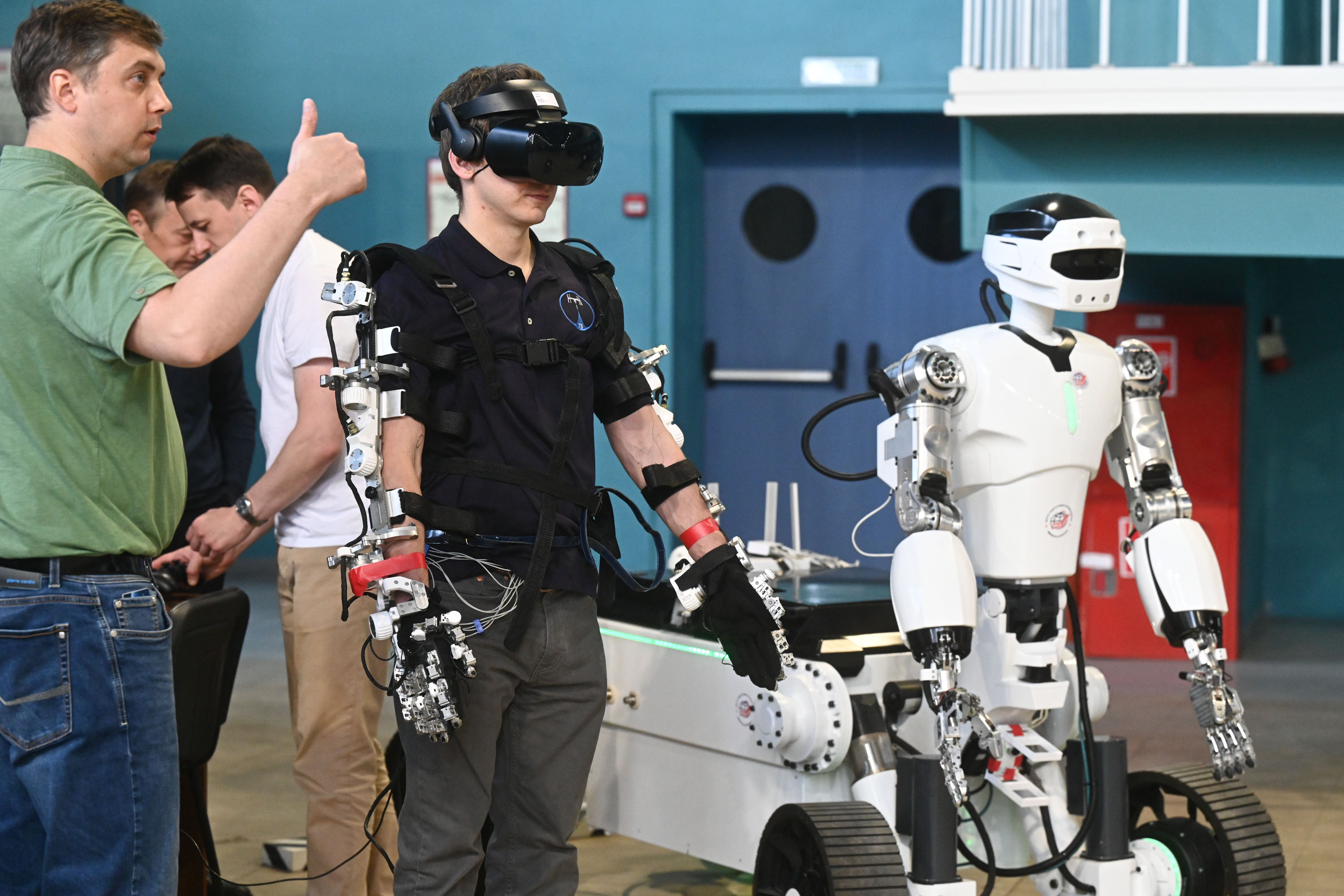
Совместная работа с роботом: у космонавта Роскосмоса Кирилла Пескова продолжаются послеполётные исследования
Изучению влияния условий долговременного космического полёта на операторские качества космонавтов посвящена научно-исследовательская работа по управлению экспериментальной робототехнической системой (роботом Марфой).

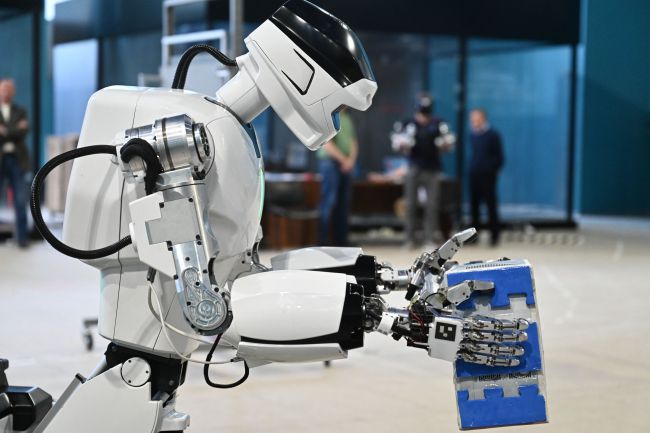
 Перед космическим полётом Кирилл Песков уже управлял антропоморфным роботом с помощью задающего устройства копирующего типа. Тогда Марфа выполняла следующие задачи: подъезжала к функциональной панели для выполнения манипуляций с органами управления, забирала имитацию научной аппаратуры, размещала её на грузовой площадке и перевозила в заданную точку. Кроме того, отрабатывалась и работа с карабином – робот отстёгивал его от стенда.
Перед космическим полётом Кирилл Песков уже управлял антропоморфным роботом с помощью задающего устройства копирующего типа. Тогда Марфа выполняла следующие задачи: подъезжала к функциональной панели для выполнения манипуляций с органами управления, забирала имитацию научной аппаратуры, размещала её на грузовой площадке и перевозила в заданную точку. Кроме того, отрабатывалась и работа с карабином – робот отстёгивал его от стенда.
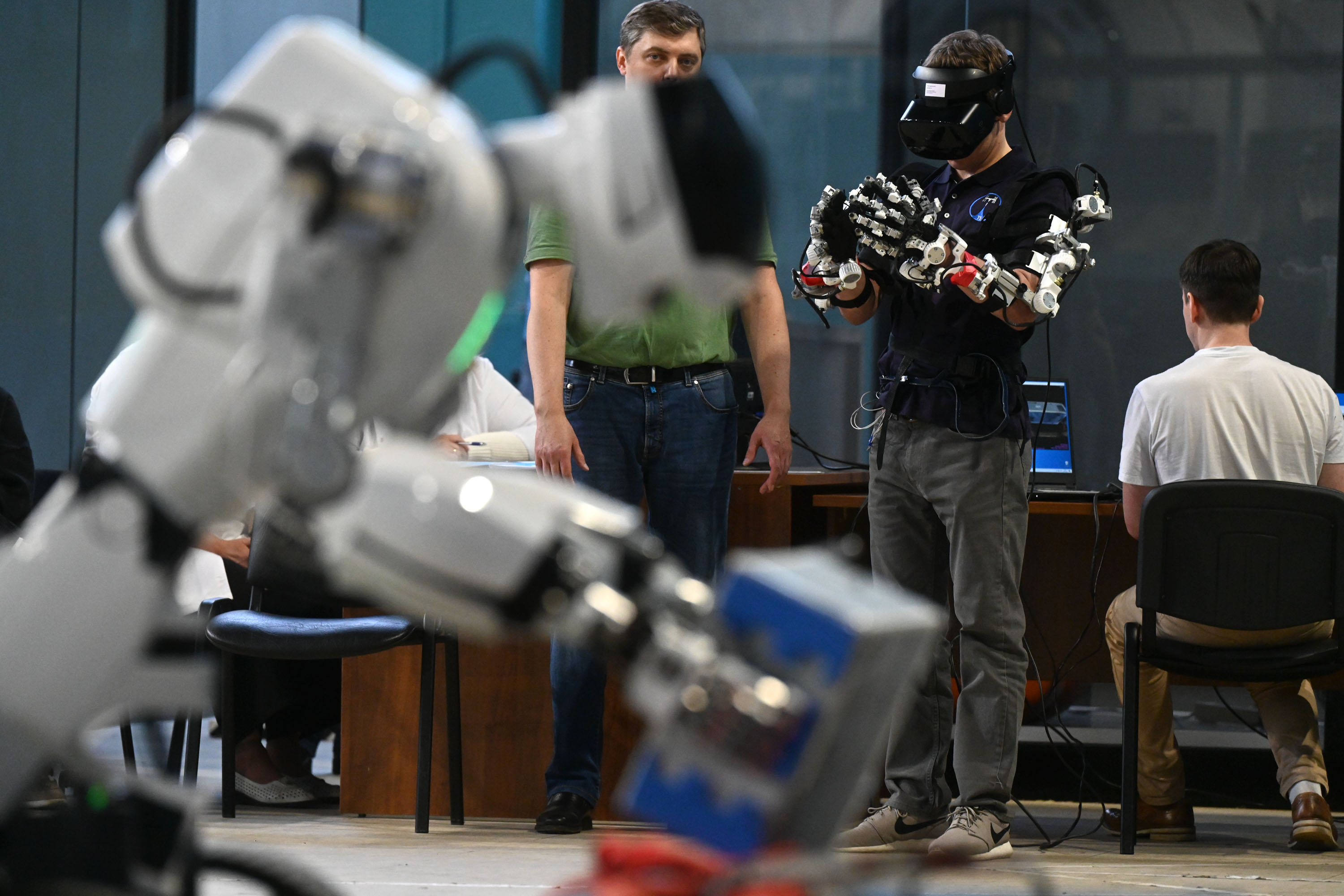
После полёта Кирилл с Марфой вновь прошёл весь маршрут, а специалисты управления научно-прикладных исследований проблем подготовки космонавтов и медицинского управления ЦПК снимали фоновые показатели космонавта.
«Это второй космонавт, который проходит у нас послеполётные исследования. До этого был космонавт Иван Вагнер, который участвовал в такой работе на 5 сутки по его возвращении. С Кириллом Песковым мы проводим исследования на 16 сутки по его возвращении. Мы сравним, как меняются операторские качества в зависимости от времени возвращения на Землю. 14–16 суток – это тоже интересная для нас информация с точки зрения того, как будут изменяться операторские качества после длительного нахождения в космосе, например, при применении ими такого рода эргатических систем («человек–машина») в напланетных миссиях», – рассказал начальник управления научно-прикладных исследований проблем подготовки космонавтов ЦПК Владимир Дикарев.
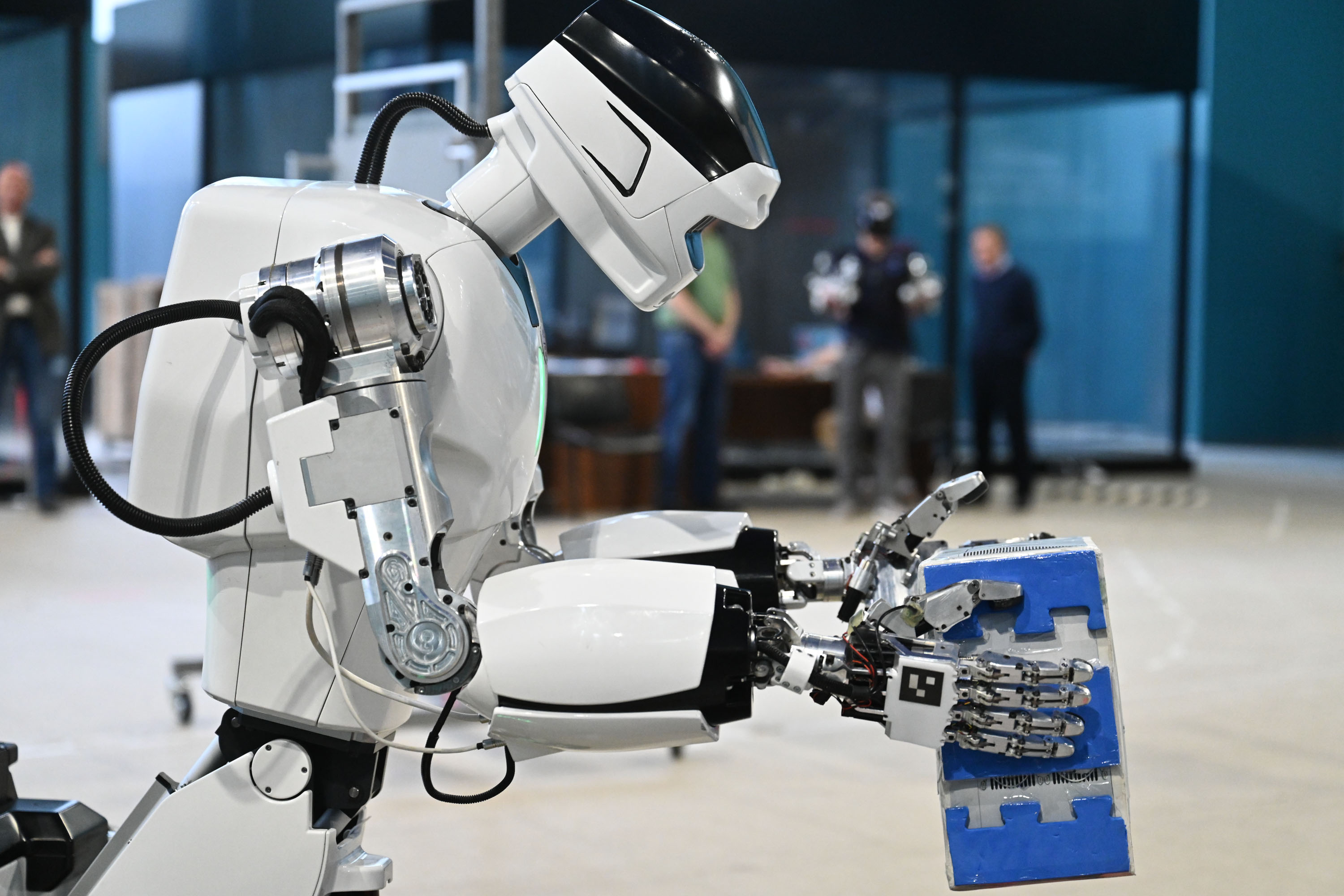
Научные сотрудники Центра оценивают технические параметры работы робота и его платформы, характеризующие, например, длительность и точность выполнения операций. Полученные результаты, а также рекомендации специалистов ЦПК и космонавтов направляют в адрес АО «НПО «Андроидная техника», чтобы усовершенствовать робототехническую систему.

На смену Марфе должен прийти Теледроид – экспериментальный робот-помощник космонавтов на МКС, который предназначен для работы на внешней поверхности РС МКС, как в автоматическом, так и в ручном режиме (в случае нештатных ситуаций).


Опытный образец экспериментального робота нового поколения успешно прошёл серию испытаний, в частности был доставлен в ЦПК и выдержал на центрифуге заданные перегрузки, которые могут потенциально возникнуть при доставке робота на орбиту. Сейчас полученные данные анализируют специалисты.
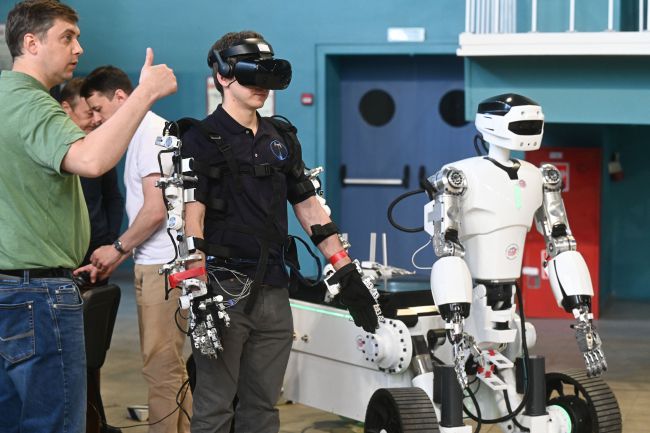
 «Бортовая реализация целевой работы «Теледроид» предполагается во второй половине 2026 года. Поэтому сейчас мы проводим исследования для того, чтобы понять, какие операции Теледроид, как некоторый аналог Марфы, может выполнять в ручных режимах под управлением космонавтов.
«Бортовая реализация целевой работы «Теледроид» предполагается во второй половине 2026 года. Поэтому сейчас мы проводим исследования для того, чтобы понять, какие операции Теледроид, как некоторый аналог Марфы, может выполнять в ручных режимах под управлением космонавтов.
Основной режим будет таким же, как у данного изделия, это супервизорное управление – распознавание объектов в автоматическом режиме с помощью технического зрения и работа с этим объектами. И голосовое управление – это распознавание команд, получаемых от космонавта, и выполнение этих команд. Для режима ручного управления надо учитывать антропоморфные показатели каждого космонавта (например, длину рук), чтобы задающее устройство копирующего типа работало корректно. Разработчик продолжает над этим работать, задача решается», – сообщил подробности Владимир Дикарев.
Пока же космонавты будут участвовать в отработке операций управления роботом Марфа. На вторую половину 2026 года запланирована экспедиция российских космонавтов Петра Дуброва и Анны Кикиной. Анна уже участвовала в до- и послеполётных экспериментальных исследованиях с антропоморфным роботом «Федором» и, возможно, примет участие в новом космическом эксперименте.
 назад
назад