Робот «Теледроид» в ЦПК: начались тренировки с будущим «помощником космонавтов»
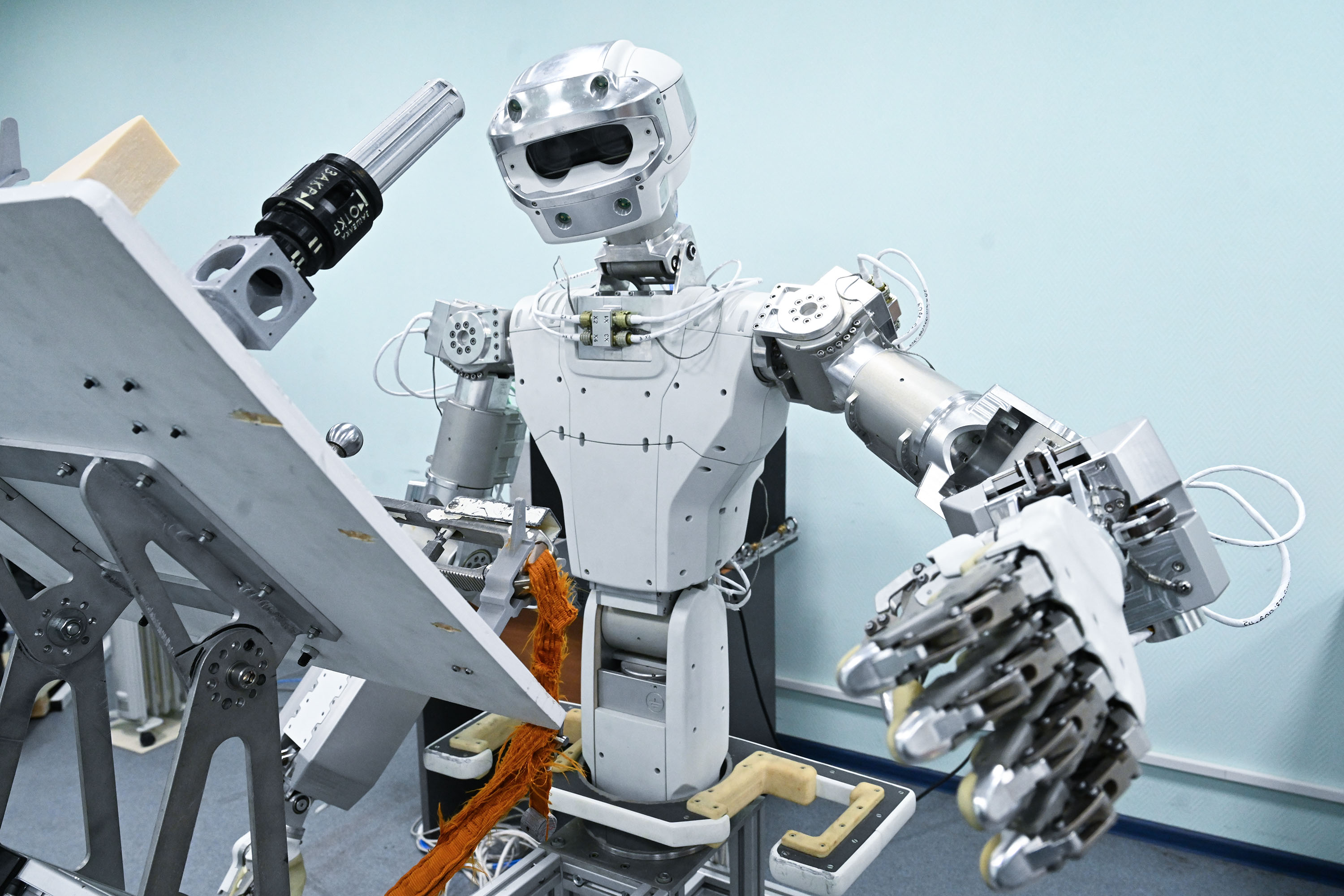
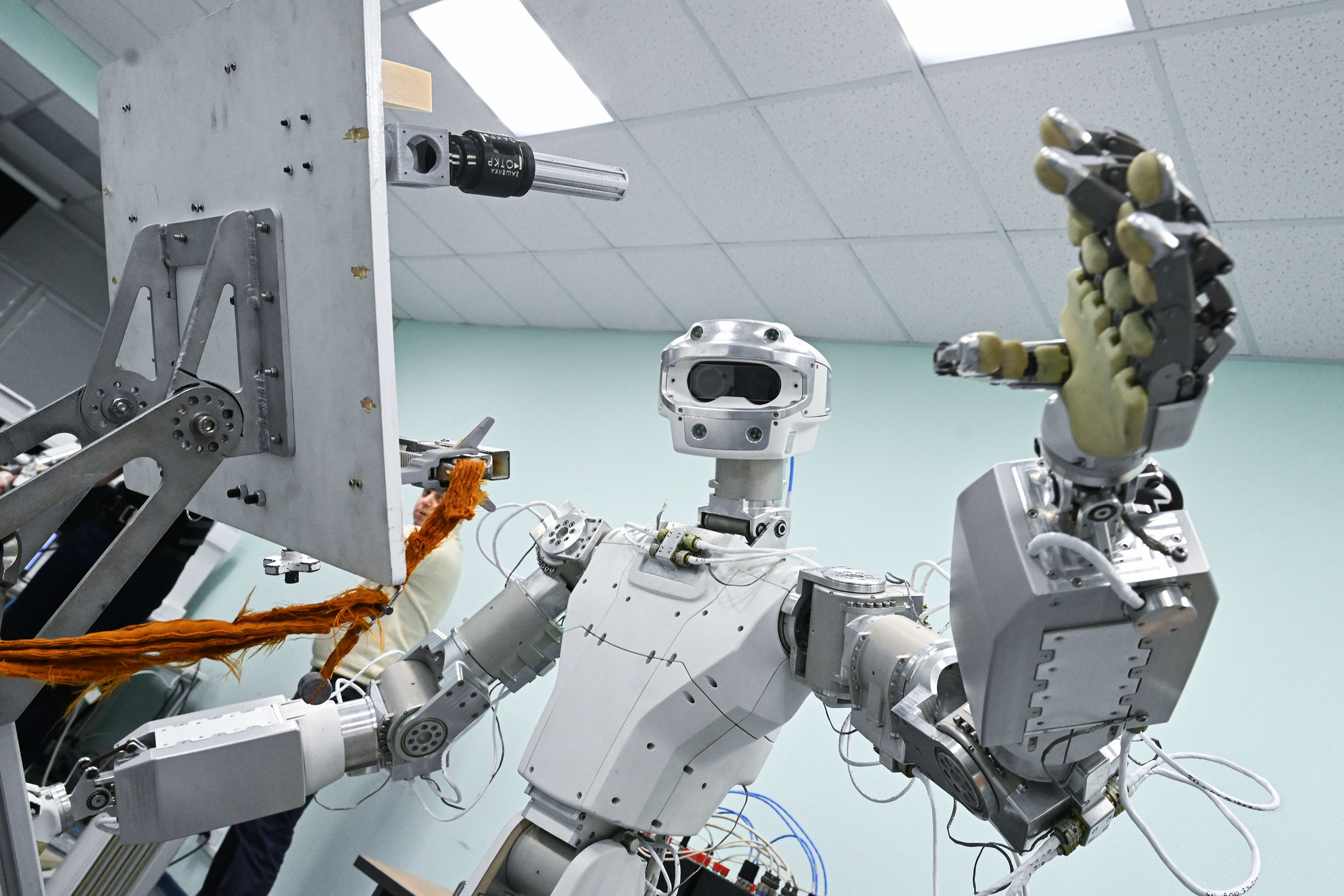
Российские члены экипажа МКС-75 Пётр Дубров и Анна Кикина приступили к тренировкам по отработке нового космического эксперимента – управлению антропоморфным роботом «Теледроид». Устройство предназначено для помощи в работе космонавтов на внешней поверхности российского сегмента Международной космической станции. Это позволит снизить риски и затраты, связанные с выходом людей в открытый космос. «Теледроид» способен выдерживать вакуум, радиацию и перепады температур.


Опытный образец экспериментального робота нового поколения прошёл серию испытаний, и теперь специалисты Центра проводят тренировки с космонавтами для отработки задач научной программы экспедиции МКС-75.


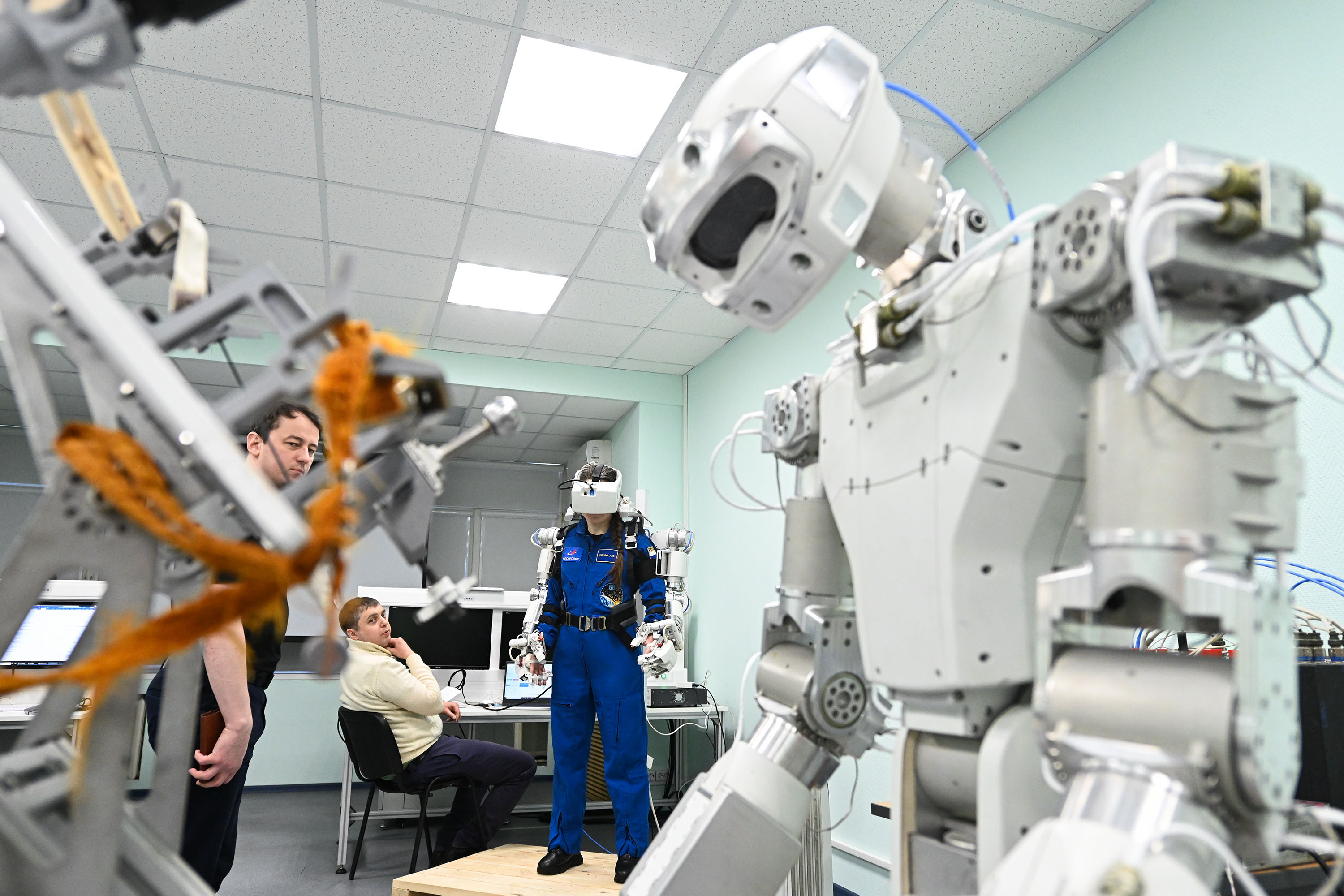
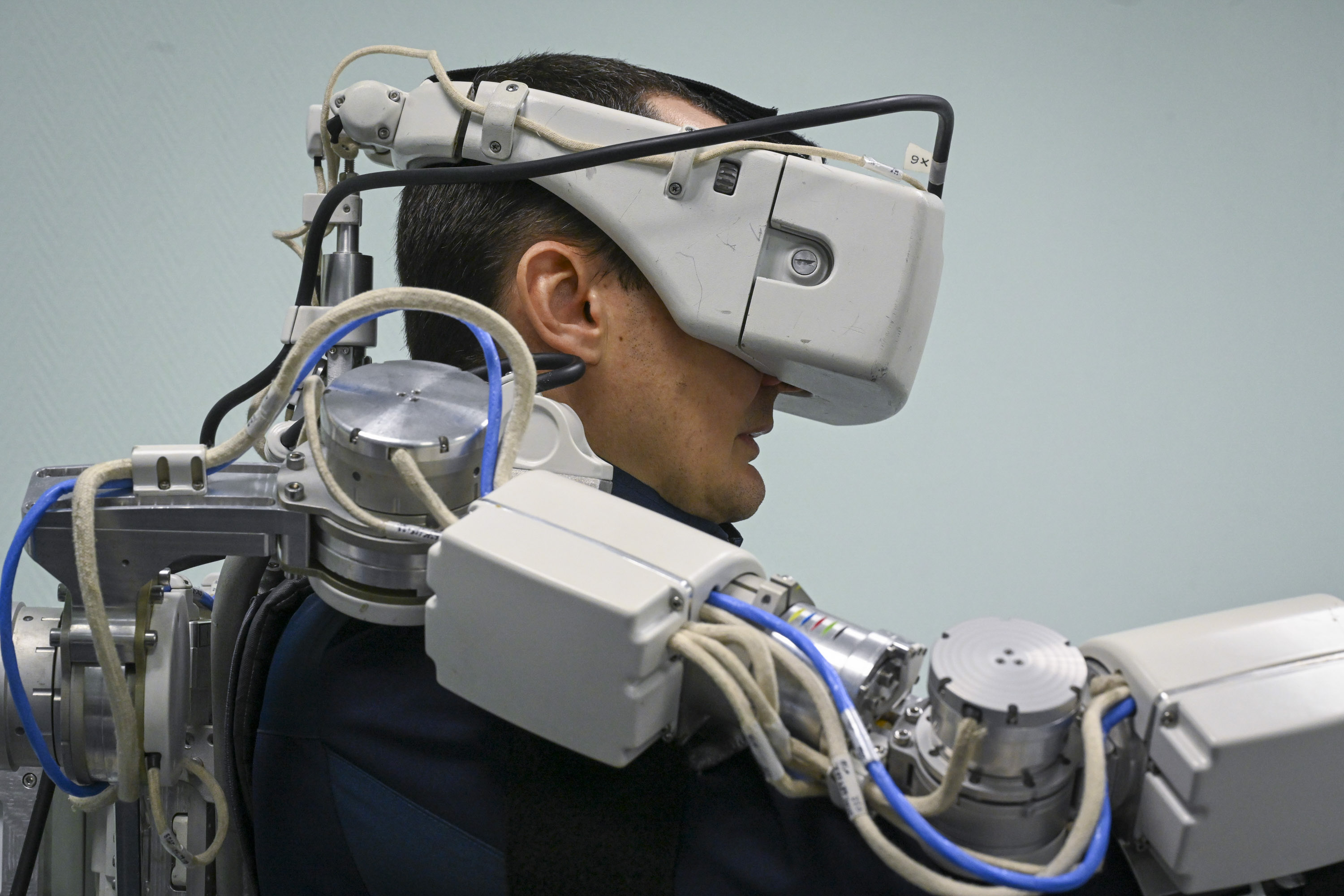
Система управления (задающее устройство копирующего типа, в которое облачается космонавт, и очки виртуальной реальности) будет находиться внутри станции, а самого робота впервые установят на внешней поверхности РС МКС. «Телеуправляемый андроид» сможет работать как в автоматическом, так и в ручном режиме. Также впервые будет использоваться голосовое управление его действиями.

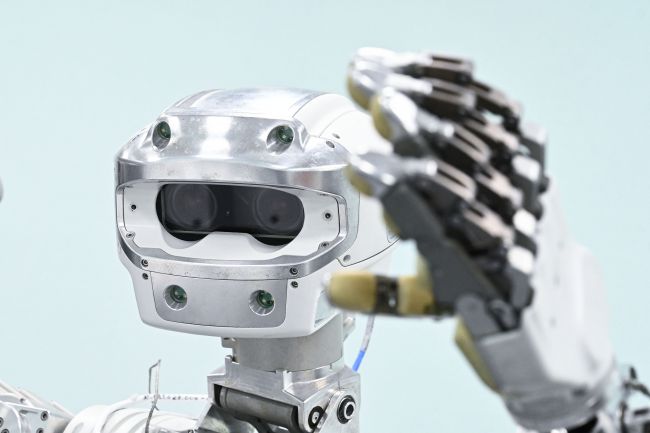
«В работе устройства предусмотрено три режима работы: автоматический, копирующий – самый трудоёмкий для космонавтов, и супервизорный, при котором управление происходит голосовыми командами. При супервизорном управлении космонавт даёт задачу, а робот, опираясь на техническое зрение, её выполняет. Например, он может взять молоток, подать ключ или другие инструменты, совершить другие типовые операции», – рассказал старший научный сотрудник Центра Юрий Чеботарёв, ответственный за проведение подготовки космонавтов к эксперименту.



«Космонавтам предстоит выполнить работу в режиме телеуправления роботом в трех конфигурациях: 1-й – когда космонавты работают с виртуальными моделями: они включают симулятор на компьютере, и отрабатывают сценарий в виртуальной реальности, в безопасном для техники режиме; 2-й – когда космонавт управляет реальным Теледроидом, расположенном внутри РС МКС; наконец, в 3-м режиме робот устанавливается на внешней поверхности станции, и космонавты могут выполнять работу с помощью копирующего управления (оператор будет находиться внутри станции, а робот на внешней стороне станции)», – дополнил Юрий Чеботарёв.


«Наша задача, как испытателей и операторов, работать с данным видом оборудования, с задающим устройством копирующего типа, которое передаёт движение на робота, и выполнять базовые целевые операции. Конечно, для нас это очень интересно. Работа предстоит большая – необходимо дать обратную связь и вместе со специалистами двигаться в развитии этого направления», – поделилась впечатлением после тренировки Анна Кикина.


Экспериментальный робот разработан АО «НПО «Андроидная техника», постановщиком эксперимента является АО «ЦНИИмаш».
«Полученные результаты, а также рекомендации специалистов ЦПК и космонавтов будут направлены в адрес разработчика, чтобы усовершенствовать робототехническую систему», – сообщил специалист по техническим средствам подготовки космонавтов Александр Куликов.


«В очередной раз активное участие в подготовке рабочих мест операторов принял завод Центра. Его работники занимаются опытным производством, и по просьбе сотрудников Центра они оперативно и качественно изготовили пандус, подставки, функциональную панель-стенд, регулируемую стойку и другие конструкции для удобства проведения исследований и подготовки космонавтов», – добавили кураторы эксперимента.


 назад
назад