
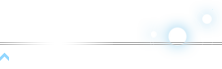
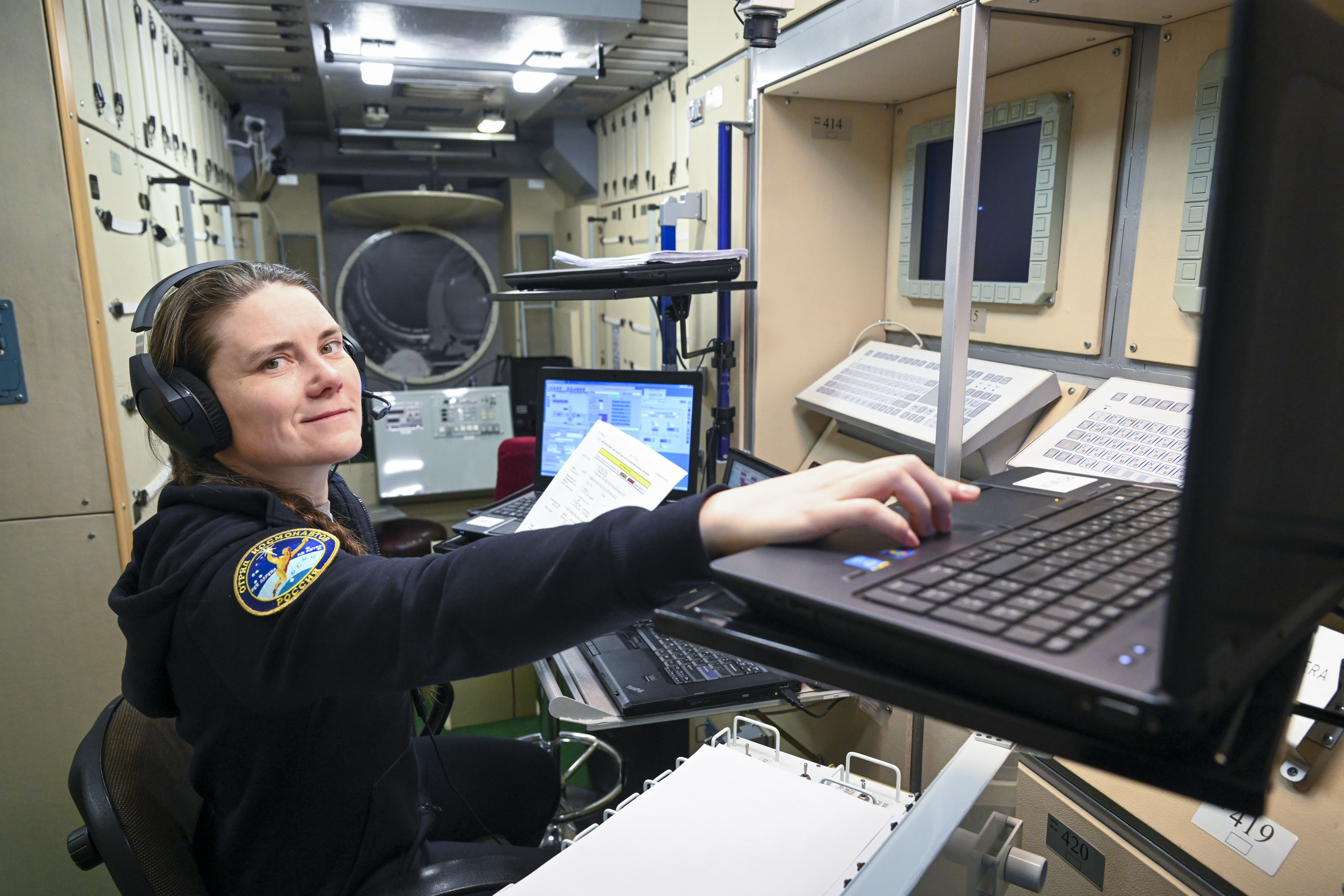
Космонавты Роскосмоса Пётр Дубров и Анна Кикина успешно прошли контрольную тренировку на тренажёре «Дон-ERA»
 Манипулятор ERA – это дистанционно управляемый космический робот, который располагается на поверхности многофункционального лабораторного модуля «Наука» российского сегмента МКС и предназначен для его обслуживания, инспектирования внешней поверхности станции, работы с полезной нагрузкой и выполнения задач поддержки внекорабельной деятельности (ВКД).
Манипулятор ERA – это дистанционно управляемый космический робот, который располагается на поверхности многофункционального лабораторного модуля «Наука» российского сегмента МКС и предназначен для его обслуживания, инспектирования внешней поверхности станции, работы с полезной нагрузкой и выполнения задач поддержки внекорабельной деятельности (ВКД).
Симметричная конструкция с двумя захватами, оснащённая телекамерами, позволяет манипулятору перемещаться по поверхности РС МКС, используя базовые точки.
В процессе выхода в открытый космос манипулятор ERA используется для перемещения грузов на внешней стороне станции и перемещения космонавтов в переносном рабочем месте (ПРМ).
Робот может работать в автоматическом режиме, выполняя целевые задачи: специалисты РКК «Энергия» разрабатывают программное обеспечение в виде автопоследовательностей, а космонавты на борту загружают их и управляют манипулятором в супервизорном режиме.
Есть и более сложный режим управления – ручной. Именно его отрабатывали на практических занятиях на тренажёре «Дон-ERA» Пётр Дубров и Анна Кикина. Космонавты выдавали команды с лэптопа, задавая необходимые параметры и контролируя перемещение манипулятора с помощью мониторов, на которые выводились видеоизображения с камер, установленных на внешней поверхности станции.


Прежде всего, космонавты выполнили типовые операции – различные режимы ручного управления. Также они отработали несколько видов аварийных «остановов» манипулятора. Например, во время ВКД российский член экипажа, находящийся в ПРМ, при сближении с элементами станции в зоне обслуживания может запросить выдачу команды «ERA-СТОП», оценивая безопасное расстояние, и тогда оператор, который находится внутри станции и управляет манипулятором, выдаёт необходимую команду.
 Помимо отработки типовых операций, Пётр Дубров и Анна Кикина парировали нештатные ситуации. Например, при ошибочной работе подсистем необходимо доложить на Землю информацию с пульта управления, что позволит специалистам ЦУПа найти оптимальный сценарий выхода из нештатной ситуации.
Помимо отработки типовых операций, Пётр Дубров и Анна Кикина парировали нештатные ситуации. Например, при ошибочной работе подсистем необходимо доложить на Землю информацию с пульта управления, что позволит специалистам ЦУПа найти оптимальный сценарий выхода из нештатной ситуации.
Ещё один сбой в системе был связан с нарушением распознаванием мишени базовой точки камерой манипулятора, которая расположена на исполнительном механизме. В таком случае робот не может в автоматическом режиме приблизиться и состыковаться к базовым точкам на поверхности модуля. При возникновении такой нештатной ситуации оператор ERA производит эти действия вручную.
«На практических занятиях и тренировках мы изучали особенности пульта управления, работу в автоматическом и ручном режимах управления, отрабатывали типовые операции и оттачивали действия при парировании нештатных ситуаций. Полученные навыки российские члены основного экипажа МКС-75 продемонстрировали на контрольной тренировке.
Комиссия оценивала, как космонавты ведут радиосвязь, работают с радиограммой и управляют манипулятором на внутреннем пульте управления. Во время сеанса радиосвязи мы обращали внимание на то, насколько подробно и точно оператор описывает ситуацию, «теряет» или нет важную информацию, и насколько лаконично формулирует доклады – это важно, потому что влияет на время выполнения операции, особенно во время ВКД. При работе с радиограммой оценивали чёткость действий и контроля необходимых параметров, если космонавт что-то пропустил, то оценка снижалась. При управлении манипулятором с внутреннего пульта отмечали, насколько ошибочны действия оператора», – рассказал ведущий специалист по подготовке ЦПК Максим Кондратенко.


Пётр Дубров и Анна Кикина во время тренировок успешно выполнили поставленные инструктором задачи, и по итогам контрольной тренировки показали отличные результаты.
 назад
назад













Г.О. ЗВЕЗДНЫЙ ГОРОДОК,
П ЗВЕЗДНЫЙ ГОРОДОК
Телефон: (495) 526-34-07